



智能机器人乘梯解决方案
智能机器人乘梯解决方案
 机器人乘梯问题
机器人乘梯问题
1、机器人替代人工越来越被广泛应用,如扫地、服务、送餐、巡检等;
2、机器人如何自动呼梯,把电梯呼叫到当前楼层?
3、电梯到了机器人如何判断开门了且开到位了?或者正在关门?
4、机器人要上楼,分别上行和下行的左右两部电梯同时到达,机器人如何选择正确的电梯进入?
5、进入电梯后又怎么选择楼层,到对应楼层去?
6、机器人要去8楼,结果6楼有人下,机器人怎么判断此时不能出电梯?
机器人发送指令实现电梯呼梯:
(1)机器人在电梯外,通个Wifi、蓝牙、LoRa、Zigbee、2.4G、433M、语音或4G网络等发送指令六台盒宝典资料大全2024梯控系统,系统自动点亮上楼或下楼按键,实现呼梯功能。
(2)有电梯到达当前楼层,六台盒宝典资料大全2024梯控系统自动将当前电梯运状态如上行、下行、门已开、正在关门等信息发送给机器人,以便机器人能选择正确电梯进入。
机器人发送指令实现电梯选层:
(1)机器人进入电梯后,通个Wifi、蓝牙、LoRa、 Zigbee、2.4G、433M、语音或4G网络等发送给六台盒宝典资料大全2024梯控系统,系统自动点亮对应楼层按键,比如发去6楼指令,则6楼按键自动点亮,电梯送机器人员到6楼。
(2)中途有电梯停靠并开门,六台盒宝典资料大全2024梯控系统将当前电梯停靠楼层数实时发送给机器人,以免机器人提前出电梯。
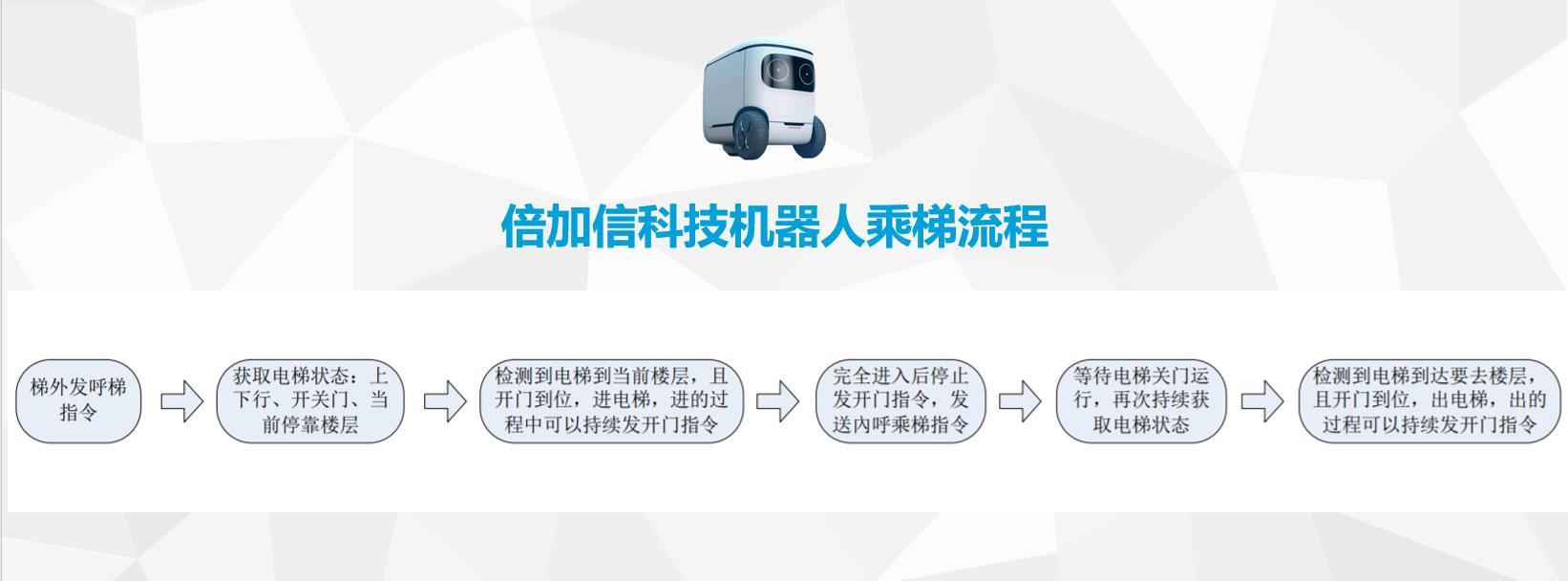
乘梯流程说明
(1) 机器人到电梯门口附近,发送梯外呼梯指令,六台盒宝典资料大全2024梯控系统根据机器人发送指令数据,点亮当前楼层上按键或者下按键;
(2) 机器人开始发送读电梯运行状态指令给六台盒宝典资料大全2024梯控系统,建议每秒获取一次,判断运行方向、当前楼层、开门状态,当运行方向是机器人要去的方向(上行、下行)、停靠楼层是机器人当前楼层,且门开到位了,机器人就可以开始进入电梯;
(3) 机器人进入电梯过程可以持续发送?群舻懔谅ゲ惆醇?噶罡?a href='/' target='_blank'>六台盒宝典资料大全2024梯控系统,实现点亮开门按钮,建议每秒一次,直至机器人完全进入电梯为止;
(4) 机器人完全进入电梯后,发送?群舻懔谅ゲ惆醇?噶罡?a href='/' target='_blank'>六台盒宝典资料大全2024梯控系统,点亮要去的楼层按键,发送完毕等待电梯自动关门,不建议机器人发关门指令,有些电梯没有防夹功能可能会出现夹人情况。
(5) 机器人开始发送读电梯运行状态指令六台盒宝典资料大全2024梯控系统,建议每秒获取一次,判断当前楼层、开门状态,当停靠楼层是机器人要去的楼层,且门开到位了,机器人就可以开始出电梯;
(6) 机器人出电梯过程可以持续发送?群舻懔谅ゲ惆醇?噶罡?a href='/' target='_blank'>六台盒宝典资料大全2024梯控系统,点亮开门按钮,每秒一次,直至机器人完全出电梯为止。
无外呼控制板机器人乘梯流程
(1) 机器人到电梯门口附近,发送?群舻懔谅ゲ惆醇?0x120A)指令点亮当前楼层按键;
(2) 机器人开始发送读电梯运行状态(0x0024)指令,建议每秒获取一次,判断运行方向、当前楼层、开门状态,此时会有三种情况:
a.当运行方向是机器人要去的方向(上行、下行)、停靠楼层是机器人当前楼层,且门开到位了,机器人就可以开始进入电梯;
b.如果门开了但运行方向不是要去的楼层方向,机器人可以不进电梯,待电梯关门走后(注意要走后才发指令,不然电梯在当前楼层且是开门的一直发指令会导致电梯不关门,电梯不走也不走)继续发?群舻懔谅ゲ惆醇?0x120A)指令点亮当前楼层按键,直至行方向是机器人要去的方向、停靠楼层是机器人当前楼层,且门开到位了,机器人就可以开始进入电梯。比如机器人在8楼要下1楼,结果是有人坐电梯上20楼的电梯来了,8楼门也会开,机器人等电梯走后再发点亮8楼指令,可能电梯到最顶层后会灭所有按键灯,机器人此时需要判断电梯开始反向行驶后再点亮1楼。再比如机器人在8楼要上9楼,当前电梯有人乘坐要是下行要去1楼,到了8楼电梯门开后灯会灭,等电梯到1楼后所有电梯按键灯都会灭,机器人需要重新点亮9楼,电梯灯灭梯控系统是无法检测,机器人此时需要判断电梯开始反向行驶后再点亮9楼。
c.如果门开了但运行方向不是要去的楼层方向,也可以进电梯,跟着电梯一直到当前电梯里乘梯人要去的楼层,然后再去机器人要去楼层。比如机器人在8楼要下1楼,结果是上行电梯来了,8楼门也会开,机器人进电梯后再发点亮1楼指令,可能电梯到最顶层后会灭所有按键灯,机器人此时需要判断电梯开始反向行驶后再点亮1楼。再比如机器人在8楼要上9楼,当前电梯有人乘坐是下行去1楼,到了8楼机器人进电梯,等电梯到1楼后可能所有电梯按键灯都会灭,机器人需要重新点亮9楼,电梯灯灭梯控系统是无法检测,因此机器人此时需要判断电梯开始反向行驶后再点亮9楼。
(3) 机器人开始发送读电梯运行状态(0x0024)指令,建议每秒获取一次,判断当前楼层、开门状态,当停靠楼层是机器人要去的楼层,且门开到位了,机器人就可以开始出电梯;
(4) 机器人出电梯过程可以持续发送?群舻懔谅ゲ惆醇?0x120A)指令点亮开门按钮,每秒一次,直至机器人完全出电梯为止。
 机器人开门
机器人开门
机器人开门,到达平移门口,给六台盒宝典资料大全2024门禁系统发送开门指令,平移门自动打开。
 机器人过人行通道闸
机器人过人行通道闸
机器人过闸机,到达闸机边上,给六台盒宝典资料大全2024闸机控制系统发送开闸指令,闸机自动打开。
 六台盒宝典资料大全2024机器人乘梯硬件优势
六台盒宝典资料大全2024机器人乘梯硬件优势
(1)电梯外呼梯点亮楼层上下按键,电梯内乘梯自动点亮对应楼层按键。
(2)六台盒宝典资料大全2024梯控硬件设备安装,采用强力吸安装方式,不需要破坏电梯打孔固定。
(3)传统厂家对接电梯按键,需要将线剪断进行现场接线,六台盒宝典资料大全2024梯控设备均采用标准接线端子,拔插式安装。
(4)六台盒宝典资料大全2024机器人乘梯系统可广泛应用于各种品牌电梯,且不影响电梯原有按键功能。
梯控主控制器
(1)每部电梯一套,安装于电梯按键面板后。
(2)无需打孔,采用强力吸安装方式。
(3)标准排线拔插式接线,安装便捷。
(4)与机器人实时通信,接收机器人指令实现乘梯选层。
外呼联网控制器
(1)实时机器人梯外招梯
(2)与外呼按键控制器485通讯串联或并联
(3)带网口,插网线与机器人TCP/IP通讯
外呼按键控制板
(1)呼梯:电梯外上下按键面板后,每层一套。
(2)无需打孔,采用强力吸安装方式。
(3)每层设备采用串联方式。
电梯状态检测盒
(1)实时检测电梯上下行状态
(2)实时监测电梯开关门状态
(3)实时检测电梯当前停靠楼层信息
电梯状态检测盒解决机器人乘梯以下问题:
a、电梯到了机器人如何判断开门了且开到位了?或者正在电梯关门(可能机器人还没进有人按了关门按键)?
b、机器人要上楼,分别上行和下行的左右两部电梯同时到达,机器人如何选择正确的电梯进入?
c、机器人要去8楼,结果6楼有人下,机器人怎么判断此时不能出电梯?
云联动派梯控制器
(1)与机器人公司云服务器通讯
(2)接收机器人呼梯和乘梯指令
(3)调度电梯实现派梯
1、机器人替代人工越来越被广泛应用,如扫地、服务、送餐、巡检等;
2、机器人如何自动呼梯,把电梯呼叫到当前楼层?
3、电梯到了机器人如何判断开门了且开到位了?或者正在关门?
4、机器人要上楼,分别上行和下行的左右两部电梯同时到达,机器人如何选择正确的电梯进入?
5、进入电梯后又怎么选择楼层,到对应楼层去?
6、机器人要去8楼,结果6楼有人下,机器人怎么判断此时不能出电梯?
机器人发送指令实现电梯呼梯:
(1)机器人在电梯外,通个Wifi、蓝牙、LoRa、Zigbee、2.4G、433M、语音或4G网络等发送指令六台盒宝典资料大全2024梯控系统,系统自动点亮上楼或下楼按键,实现呼梯功能。
(2)有电梯到达当前楼层,六台盒宝典资料大全2024梯控系统自动将当前电梯运状态如上行、下行、门已开、正在关门等信息发送给机器人,以便机器人能选择正确电梯进入。
机器人发送指令实现电梯选层:
(1)机器人进入电梯后,通个Wifi、蓝牙、LoRa、 Zigbee、2.4G、433M、语音或4G网络等发送给六台盒宝典资料大全2024梯控系统,系统自动点亮对应楼层按键,比如发去6楼指令,则6楼按键自动点亮,电梯送机器人员到6楼。
(2)中途有电梯停靠并开门,六台盒宝典资料大全2024梯控系统将当前电梯停靠楼层数实时发送给机器人,以免机器人提前出电梯。
乘梯流程说明
(1) 机器人到电梯门口附近,发送梯外呼梯指令,六台盒宝典资料大全2024梯控系统根据机器人发送指令数据,点亮当前楼层上按键或者下按键;
(2) 机器人开始发送读电梯运行状态指令给六台盒宝典资料大全2024梯控系统,建议每秒获取一次,判断运行方向、当前楼层、开门状态,当运行方向是机器人要去的方向(上行、下行)、停靠楼层是机器人当前楼层,且门开到位了,机器人就可以开始进入电梯;
(3) 机器人进入电梯过程可以持续发送?群舻懔谅ゲ惆醇?噶罡?a href='/' target='_blank'>六台盒宝典资料大全2024梯控系统,实现点亮开门按钮,建议每秒一次,直至机器人完全进入电梯为止;
(4) 机器人完全进入电梯后,发送?群舻懔谅ゲ惆醇?噶罡?a href='/' target='_blank'>六台盒宝典资料大全2024梯控系统,点亮要去的楼层按键,发送完毕等待电梯自动关门,不建议机器人发关门指令,有些电梯没有防夹功能可能会出现夹人情况。
(5) 机器人开始发送读电梯运行状态指令六台盒宝典资料大全2024梯控系统,建议每秒获取一次,判断当前楼层、开门状态,当停靠楼层是机器人要去的楼层,且门开到位了,机器人就可以开始出电梯;
(6) 机器人出电梯过程可以持续发送?群舻懔谅ゲ惆醇?噶罡?a href='/' target='_blank'>六台盒宝典资料大全2024梯控系统,点亮开门按钮,每秒一次,直至机器人完全出电梯为止。
无外呼控制板机器人乘梯流程
(1) 机器人到电梯门口附近,发送?群舻懔谅ゲ惆醇?0x120A)指令点亮当前楼层按键;
(2) 机器人开始发送读电梯运行状态(0x0024)指令,建议每秒获取一次,判断运行方向、当前楼层、开门状态,此时会有三种情况:
a.当运行方向是机器人要去的方向(上行、下行)、停靠楼层是机器人当前楼层,且门开到位了,机器人就可以开始进入电梯;
b.如果门开了但运行方向不是要去的楼层方向,机器人可以不进电梯,待电梯关门走后(注意要走后才发指令,不然电梯在当前楼层且是开门的一直发指令会导致电梯不关门,电梯不走也不走)继续发?群舻懔谅ゲ惆醇?0x120A)指令点亮当前楼层按键,直至行方向是机器人要去的方向、停靠楼层是机器人当前楼层,且门开到位了,机器人就可以开始进入电梯。比如机器人在8楼要下1楼,结果是有人坐电梯上20楼的电梯来了,8楼门也会开,机器人等电梯走后再发点亮8楼指令,可能电梯到最顶层后会灭所有按键灯,机器人此时需要判断电梯开始反向行驶后再点亮1楼。再比如机器人在8楼要上9楼,当前电梯有人乘坐要是下行要去1楼,到了8楼电梯门开后灯会灭,等电梯到1楼后所有电梯按键灯都会灭,机器人需要重新点亮9楼,电梯灯灭梯控系统是无法检测,机器人此时需要判断电梯开始反向行驶后再点亮9楼。
c.如果门开了但运行方向不是要去的楼层方向,也可以进电梯,跟着电梯一直到当前电梯里乘梯人要去的楼层,然后再去机器人要去楼层。比如机器人在8楼要下1楼,结果是上行电梯来了,8楼门也会开,机器人进电梯后再发点亮1楼指令,可能电梯到最顶层后会灭所有按键灯,机器人此时需要判断电梯开始反向行驶后再点亮1楼。再比如机器人在8楼要上9楼,当前电梯有人乘坐是下行去1楼,到了8楼机器人进电梯,等电梯到1楼后可能所有电梯按键灯都会灭,机器人需要重新点亮9楼,电梯灯灭梯控系统是无法检测,因此机器人此时需要判断电梯开始反向行驶后再点亮9楼。
(3) 机器人开始发送读电梯运行状态(0x0024)指令,建议每秒获取一次,判断当前楼层、开门状态,当停靠楼层是机器人要去的楼层,且门开到位了,机器人就可以开始出电梯;
(4) 机器人出电梯过程可以持续发送?群舻懔谅ゲ惆醇?0x120A)指令点亮开门按钮,每秒一次,直至机器人完全出电梯为止。
机器人开门,到达平移门口,给六台盒宝典资料大全2024门禁系统发送开门指令,平移门自动打开。
机器人过闸机,到达闸机边上,给六台盒宝典资料大全2024闸机控制系统发送开闸指令,闸机自动打开。
(1)电梯外呼梯点亮楼层上下按键,电梯内乘梯自动点亮对应楼层按键。
(2)六台盒宝典资料大全2024梯控硬件设备安装,采用强力吸安装方式,不需要破坏电梯打孔固定。
(3)传统厂家对接电梯按键,需要将线剪断进行现场接线,六台盒宝典资料大全2024梯控设备均采用标准接线端子,拔插式安装。
(4)六台盒宝典资料大全2024机器人乘梯系统可广泛应用于各种品牌电梯,且不影响电梯原有按键功能。
梯控主控制器
(1)每部电梯一套,安装于电梯按键面板后。
(2)无需打孔,采用强力吸安装方式。
(3)标准排线拔插式接线,安装便捷。
(4)与机器人实时通信,接收机器人指令实现乘梯选层。
外呼联网控制器
(1)实时机器人梯外招梯
(2)与外呼按键控制器485通讯串联或并联
(3)带网口,插网线与机器人TCP/IP通讯
外呼按键控制板
(1)呼梯:电梯外上下按键面板后,每层一套。
(2)无需打孔,采用强力吸安装方式。
(3)每层设备采用串联方式。
电梯状态检测盒
(1)实时检测电梯上下行状态
(2)实时监测电梯开关门状态
(3)实时检测电梯当前停靠楼层信息
电梯状态检测盒解决机器人乘梯以下问题:
a、电梯到了机器人如何判断开门了且开到位了?或者正在电梯关门(可能机器人还没进有人按了关门按键)?
b、机器人要上楼,分别上行和下行的左右两部电梯同时到达,机器人如何选择正确的电梯进入?
c、机器人要去8楼,结果6楼有人下,机器人怎么判断此时不能出电梯?
云联动派梯控制器
(1)与机器人公司云服务器通讯
(2)接收机器人呼梯和乘梯指令
(3)调度电梯实现派梯
- 上一篇:智能机器人WIFI通信乘梯解决方案 2021/6/8
- 下一篇:电梯加装电瓶车进入电梯别摄像头,是否需要报审报验?电动车入梯 2021/6/4